Train on synthetic imagery. Fly in the real world.
- Real flight imagery does not scale. It is scarce, expensive to produce and label, and does not cover enough flight conditions.
- The sim-to-real gap remains the core challenge. Models trained on conventional synthetic imagery fail on real flight imagery.
- NOVEA develops end-to-end simulation and synthetic datasets for UAV interceptors to close the sim-to-real gap.
- Internal R&D by NOVEA
GN&C for Space Situational Awareness
Complete, reusable simulation chain enabling SSA algorithm development and validation.
- End-to-end simulation from spacecraft trajectories to synthetic camera images
- Realistic operational scenarios for monitoring space objects with onboard optical sensors
- Angle-only orbit determination from camera measurements
- Custom AOCS simulator integrated with image processing pipeline
- Client: LMO, Luxembourg (now Infinite Orbits)

SCANIMUS Ultra-Fast AI Pathology Scanner
30x faster than conventional systems.
- End-to-end development from concept to prototype
- Mechanical design and optics
- Embedded control system
- Touch-screen interface
- Edge AI processing and cloud connectivity
- Automated full-slide scanning & deblurring
- Client: Fanous Photonics, USA

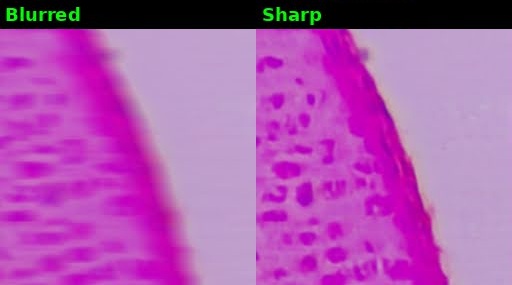
Edge AI Motion Deblurring
Real-time image deblurring on edge hardware, enabling continuous high-speed scanning.
- Custom Pix2Pix GAN network design
- Training dataset generation
- Network trained and validated on AWS
- Ported to Hailo-8 AI accelerator for on-edge real-time inference (10x speedup)
- Client: Fanous Photonics, USA
Motion Control for Gulfstream G800 Aircraft
Trajectory generation and multi-axis coordination for an articulating bed on a business jet.
- Integer-only trapezoidal trajectory algorithm optimized for PIC32 embedded MCU
- Multi-axis coordination with mechanical interference detection between axes
- Algorithm prototyped in Matlab, production C code delivered for firmware
- Full test suite, verification graphs, and design specification document
- Client: technology kitchen, USA

Spirometer Flow Measurement
High-accuracy airflow estimation algorithm for a medical spirometer, certified to ATS/ERS standards.
- Physics-based turbine model from aerodynamics to real-time estimation
- Sensor signal processing and filtering (noisy photoelectric transducer)
- Automatic calibration from test data
- Real-time C code deployed on mobile phone
- Client: Safey, India
Time Series Anomaly Detection
Automated anomaly detection in time series data, from satellite telemetry to financial markets.
- Satellite fleet health monitoring for SES (50+ spacecraft)
- Time series forecasting (Fourier, ARIMA) and residual-based anomaly detection
- Statistical process control and hypothesis testing for real-time alerting
- Extended to algorithmic trading: volatility forecasting, pattern detection, live automated trading
- VMI Technologies, France

SES14 Satellite In-Orbit Testing (IOT)
Satellite verified and cleared for operational service.
- Mission lead for SES14 In-Orbit Testing
- In-orbit verification of attitude and orbit control subsystems
- Validation of AOCS performance against simulations
- Coordination with management, operations & engineering teams
- SES, Luxembourg

Tiger Helicopter Laser Sensor
New laser sensor for the targeting sight of a combat helicopter.
- System specifications from requirements to validation
- Multidisciplinary engineering: optics, mechanics, software
- Supplier integration (BAE Systems) and customer delivery (EADS Eurocopter)
- Test bench specification, integration and system validation
- SAFRAN, France

AS332 Super Puma Helicopter Autopilot
Certified autopilot software for a Search & Rescue helicopter.
- GNC software development, coding and validation
- Model-based development & simulation
- Software-in-the-Loop and Hardware-in-the-Loop validation
- DO-178B certified flight-critical software
- Sensor fusion (IMU, Radar, GPS)
- SAFRAN, France

Robust Idle Control for Diesel Engines
H-infinity controller maintaining stable idle speed despite fuel injection uncertainties.
- Mean Value Engine Model development and identification
- Simulation and controller design in Matlab/Simulink
- H-infinity robust controller rejecting fuel injection disturbances
- Validated on real vehicle
- Delphi Luxembourg, Client: Daimler Germany

Predictive Maintenance for Brushless Motors
Real-time fault detection on operating motors, validated on physical test bench.
- Mathematical modeling and simulation of the robotic actuator and its sensors
- Extended Kalman filter for fault estimation and detection
- Custom test bench: motor, sensors, data acquisition, C++ software
- Bearing failure and load change detection from estimated parameters
- University of Texas at Austin, Robotics Research Group

Autonomous Quadcopter Research
Pioneered the quadcopter as an autonomous UAV platform, years before mainstream adoption.
- Author of IEEE 2001 paper "Exact linearization and noninteracting control of a 4 rotors helicopter via dynamic feedback"
- Proved that the quadrotor is fundamentally easier to control than a standard helicopter: an early theoretical argument for the configuration that now dominates autonomous drones.
- Laboratoire de Robotique de Paris - CNRS
